
I am currently an Assistant Professor at the College of Electronic Information Engineering, Taiyuan University of Technology. Prior to that, I received my Ph.D. degree in Control Science and Engineering from Hunan University, China in 2021, during which I was also affiliated with the National Engineering Laboratory for Robot Visual Perception and Control Technology. After that I worked at Huawei Technologies Co., Ltd, and then conducted postdoctoral research in the Department of Electronic Engineering at Tsinghua University. From 2019 to 2021, I was a visiting Ph.D. student at the School of Computing, National University of Singapore.
My research interests include:
- Embodied Intelligence and Multimodal Perception–Interaction: This research focuses on the coordination between perception and action in complex environments. It investigates multimodal information fusion and interaction mechanisms to enhance a system’s capability in real-world understanding, manipulation, and stable task execution.
- Spatial Intelligence and 3D Scene Generation: This research addresses spatial understanding and environment modeling by developing methods that integrate real-world data acquisition with generative models for 3D scene construction. It aims to build controllable spatial content generation models to support environment reconstruction and embodied intelligence training.
You can reach me at: mxueim@gmail.com
🔥 News
- 2026.02: 🎉 TBD!
👩💻 Work Experience
- 2026 - Now: Taiyuan University of Technology, Assistant Professor
- 2023 - 2026: Department of Electronic Engineering at Tsinghua University, Postdoctoral researcher
- 2021 - 2023: Huawei Technologies Co., Ltd, Algorithm engineer
📝 Selected Publications
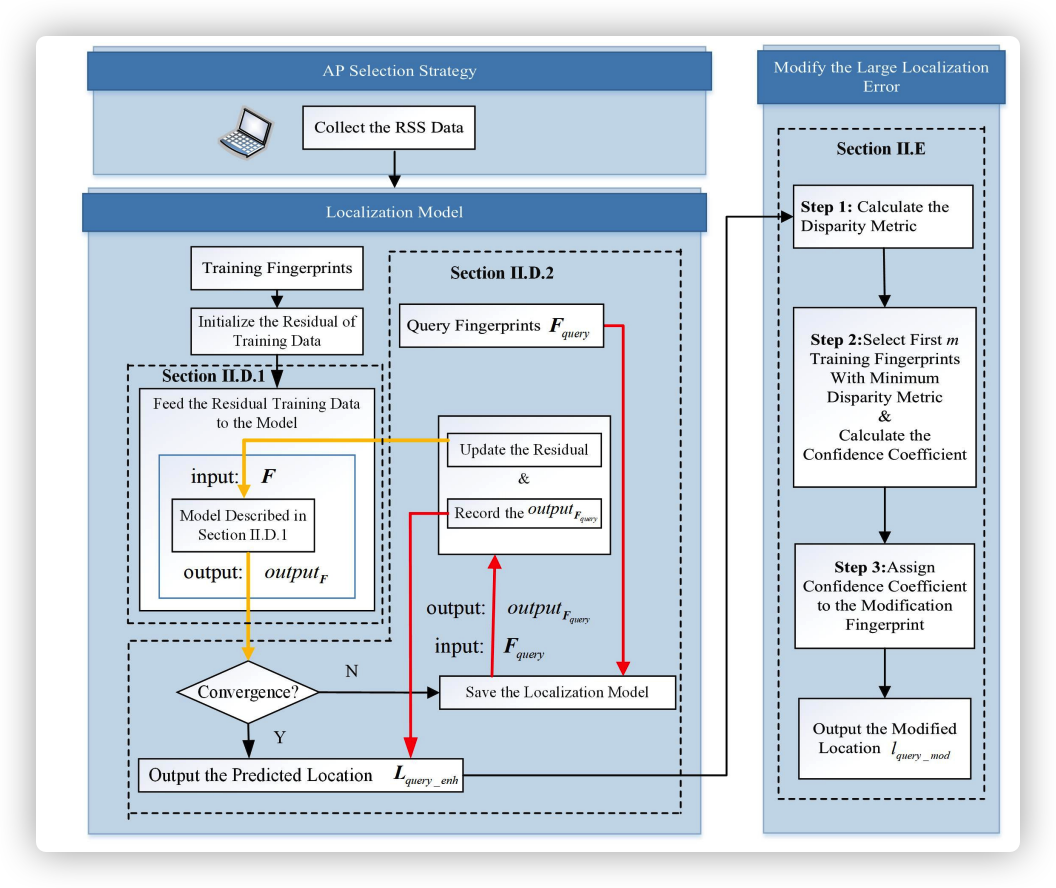
Locate the mobile device by enhancing the WiFi-based indoor localization model
M Xue, W Sun, H Yu, H Tang, A Lin, X Zhang, R Zimmermann
- The Access Point(AP) discrimination criterion (APDC) is introduced to quantify the discernibility of the APs detected in the workspace
- Localization residual is fed and learnt by the model, and large localization errors are mitigated by the location modification method
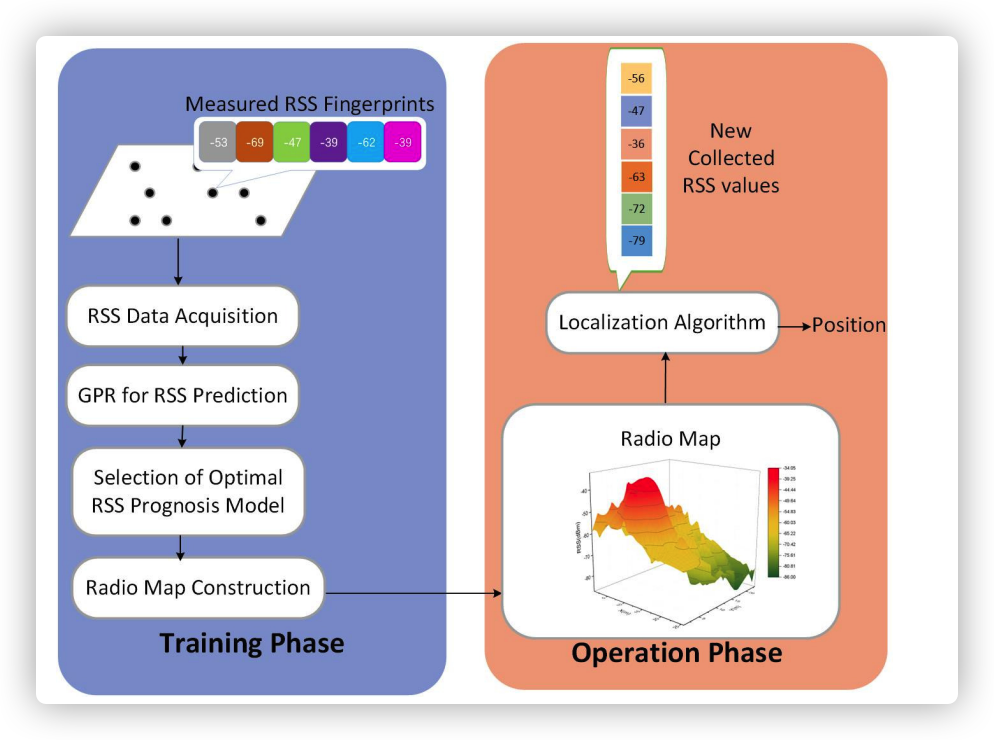
Augmentation of Fingerprints for Indoor WiFi Localization Based on Gaussian Process Regression
W Sun, M Xue*, H Yu, H Tang, A Lin
- Gaussian process regression models predict the spatial distribution of signal strength in the uncalibrated domain
- the compound kernels for received signal strength (RSS) prediction models are presented
📝 Projects
M Xue, J Yu, L Xiu, J Tang, X Cai, Y Zhao, S Liang, Y Wang
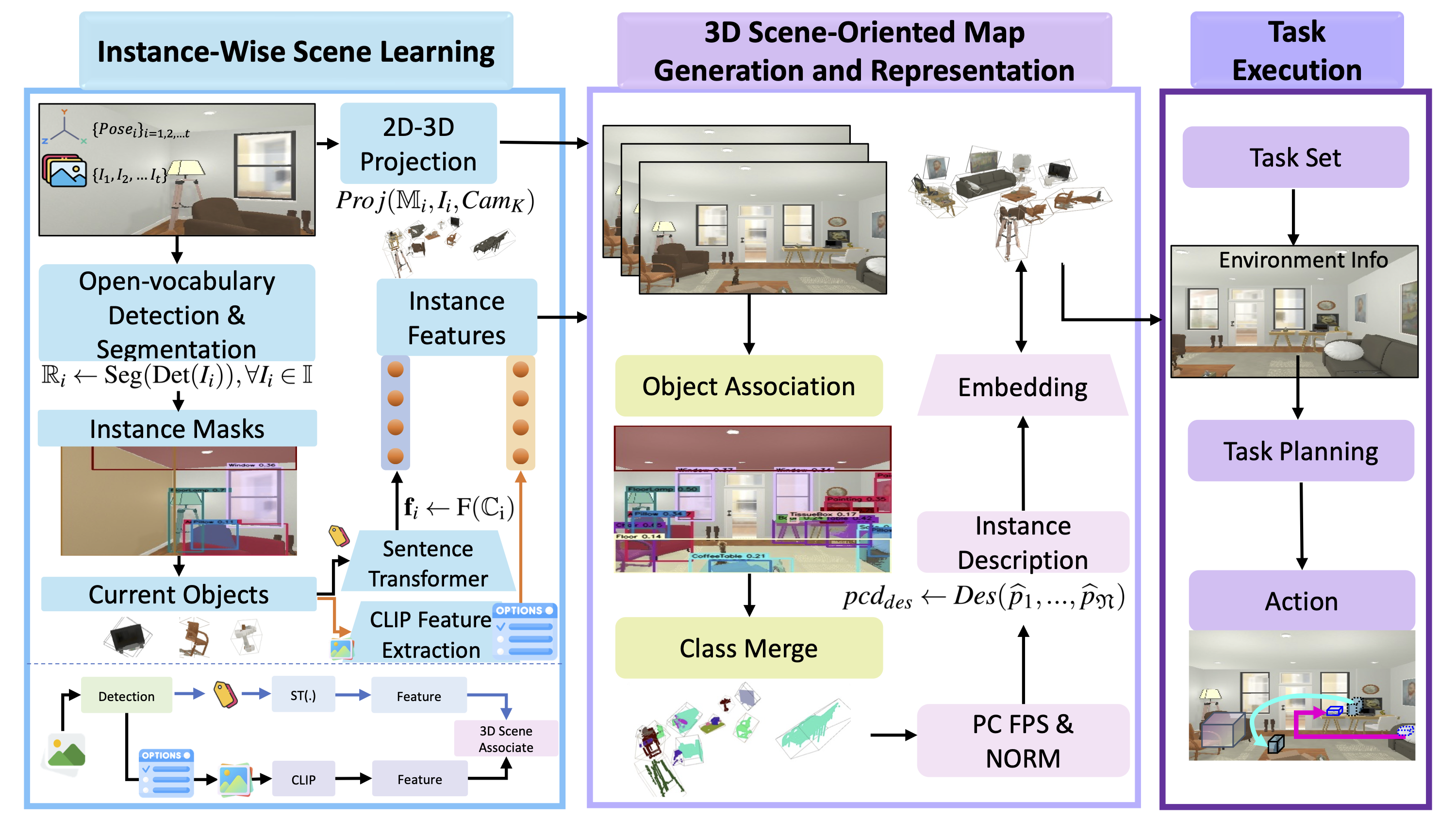
- To plan and execute robotics tasks, 3D scene perception and understanding are critical for robots to effectively interact with complex environments. We propose 3DS-Plan, an open-vocabulary 3D scene perception and generation model designed to facilitate long-horizon task planning.
- It leverages the pre-trained foundation models to support robotic scene understanding, and further provides environmental details to infer actionable steps in various scenarios.
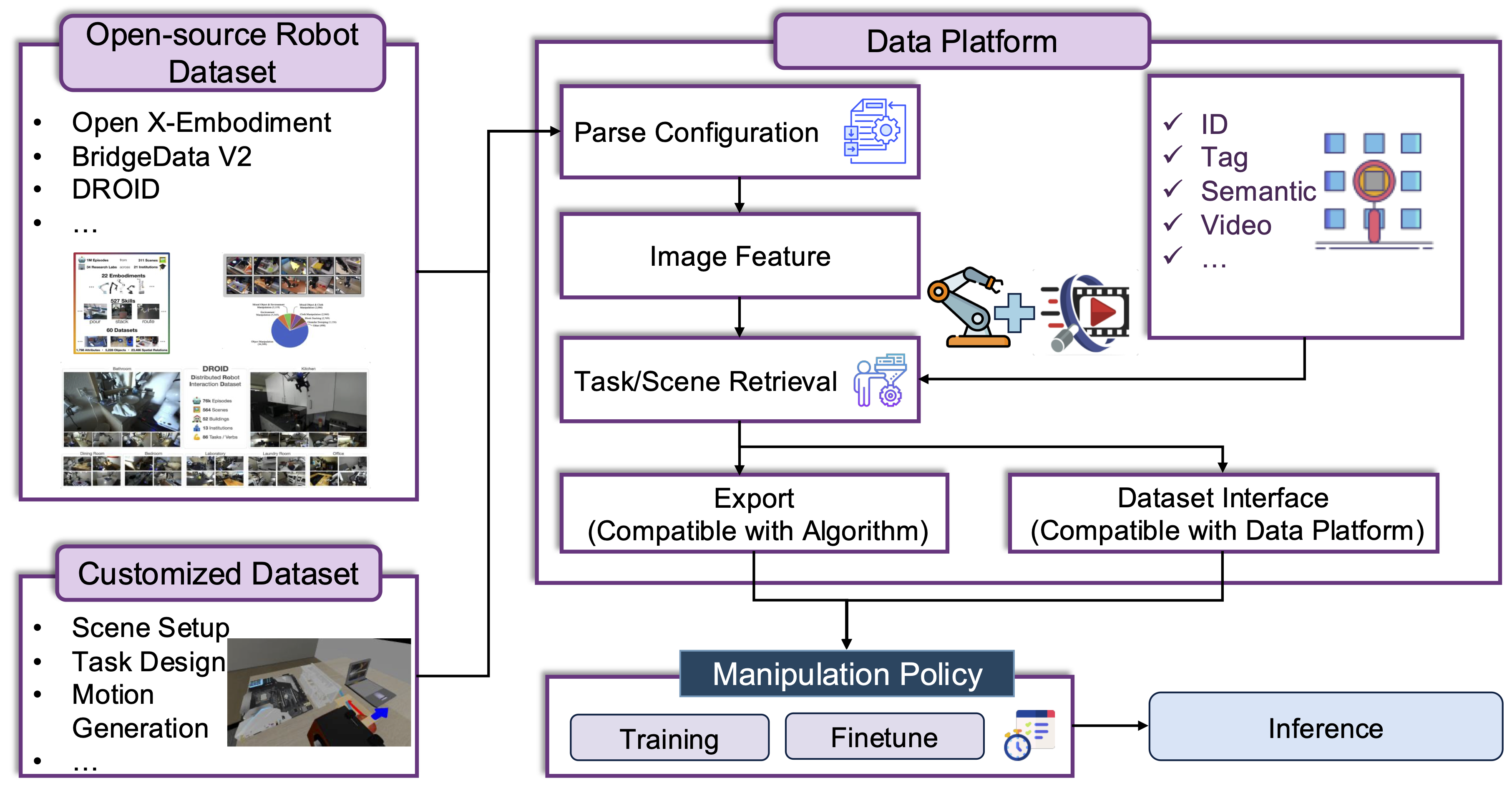
RoboDPS: A Unified Robot Data Management Platform for Policy Learning
M Xue, et al.
- We propose RoboDPS, a unified robot data management platform that effectively stores, retrieves, and visualizes data while reducing adaptation costs.
- The platform is designed to support flexible and customizable data structures, and facilitate the extraction of task-relevant information.
🎖 Honors and Awards
- [2019] Excellent Doctoral School Scholarship
- [2019] Scholarship for Postgraduate Program Sponsored by China Scholarship Council
- [2018] First-Class Prize of China Industry-University Cooperation Innovation Program
- [2014 / 2016] First-Class Scholarship of Hunan University
- [2013] Second-Class Prize in the Mathematics Competition for College Students in Hunan Province